Funktionsweise der Multifunktionskamera
Beim assistierten und automatisierten Fahren muss das Fahrzeug zu jeder Zeit wissen, was in seiner Umwelt passiert. Es muss Objekte und Personen zuverlässig erkennen und auf diese reagieren können. Die neue Generation der Front-Videokamera von Bosch spielt hierbei eine Schlüsselrolle: Die Multifunktionskamera für assistiertes und teilautomatisiertes Fahren nutzt einen innovativen und hochleistungsfähigen System-on-Chip (SoC) mit Bosch-Mikroprozessor für Bildverarbeitungsalgorithmen. Ihr einzigartiger Multipfad-Ansatz verbindet klassische Bildverarbeitungsalgorithmen mit Methoden der künstlichen Intelligenz für ein komplettes Szenenverständnis und zuverlässige Objekterkennung.
Durch den algorithmischen Multipfad-Ansatz und mit dem innovativen System-on-Chip ist diese Kamerageneration speziell für hochleistungsfähige Fahrerassistenzsysteme entwickelt. Diesem Ansatz zufolge nutzt die Multifunktionskamera parallel zum Beispiel folgende technische Pfade zur Bildverarbeitung:
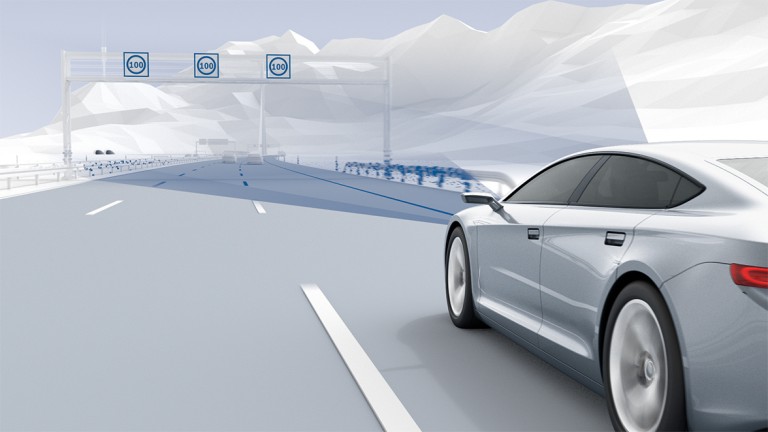
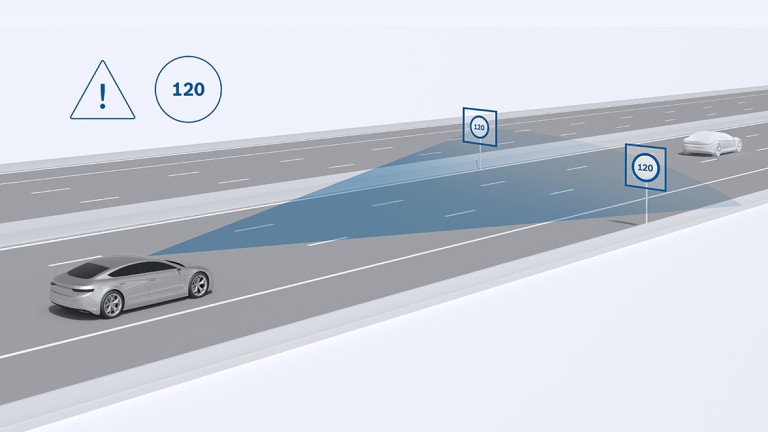
Der erste Pfad ist der heute bereits genutzte, konventionelle Ansatz. Über programmierte Algorithmen erkennen die Kameras das typische Aussehen von Objektklassen wie Fahrzeuge, Fahrrradfahrer oder Fahrbahnmarkierungen. Neu sind der zweite und dritte Pfad. Bei dem zweiten Pfad nutzt die Kamera den optischen Fluss und die sogenannte Structure from Motion (SfM), um erhabene, die Fahrbahn begrenzende Objekte wie Bordsteine, Schrammborde oder Leitplanken zu erkennen. Zusammengehörende Bildpunkte werden in ihrer Bewegung nachverfolgt. Daraus wird aus dem zweidimensionalen Kamerabild eine dreidimensionale Struktur abgeschätzt. Der dritte Pfad greift auf künstliche Intelligenz zurück. Dank maschineller Lernverfahren hat die Kamera einerseits gelernt, Objekte zu klassifizieren wie etwa am Straßenrand geparkte Autos. Andererseits kann die neue Generation über neuronale Netze und semantische Segmentierung Oberflächen der Fahrbahn und des Fahrbahnrandes voneinander unterscheiden. Darüber hinaus kommen weitere Pfade nach Bedarf zum Einsatz wie etwa klassische Linien-Verfahren, Lichterkennung oder Stereo-Disparität.